Contacts: Eng. Alaa Adel, Mr. Mahmoud Abdel Fatah, Dr. Islam Khalil
General Information: Electromagnetic coils are developed and used to generate a magnetic force and magnetic torque at a distance.
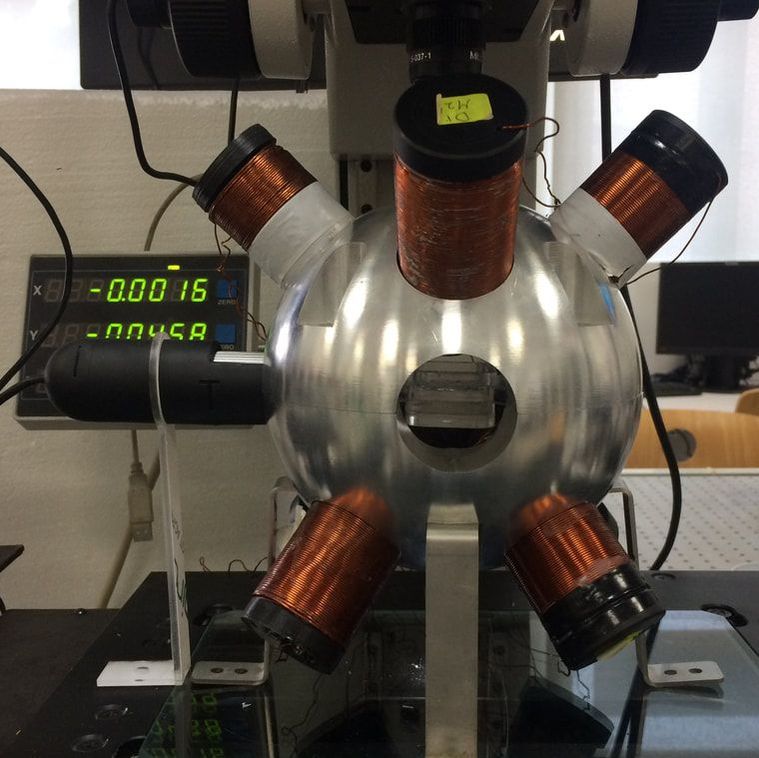
1. Development of a 3D Electromagnetic System with Automatic FocusingThis work addresses the tracking and control of microrobots using a magnetic-based manipulation system. We will present a technique to track the motion of microrobots in three-dimensional space. Our feature tracking algorithm is based on subtraction of the backgrounds of two input videos. These videos are provided by our three-dimensional magnetic system. This background subtraction allows the tracking algorithm to be insensitive to a variety of factors, such as lighting changes and perspective distortions. A model of the electromagnetic system is developed and utilized in the realization of a control system.
|
| ||
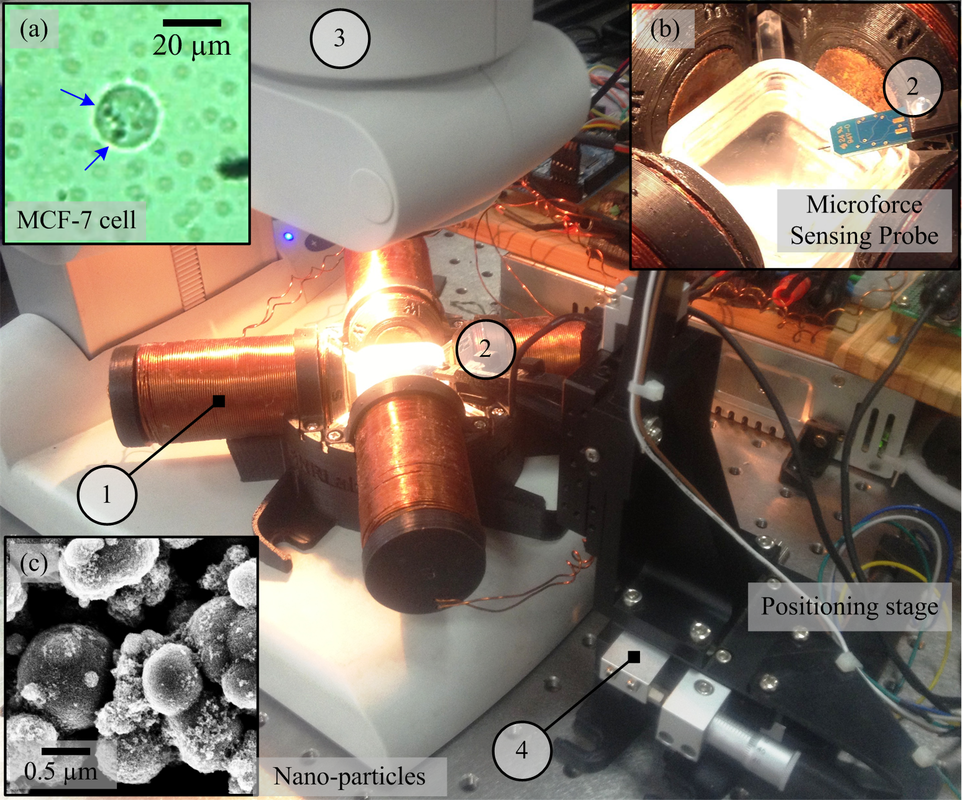
2. Characterization of the Magnetic Force of Microrobotic SystemsThis work investigates the utilization of microparticles for the wireless sensing of interaction forces in magnetic based manipulation systems. The proposed force estimation approach allows for using microparticles in sensing the interaction forces at hard-to-reach regions to avoid the mechanical and electronic complexities associated with physical force sensors. Based on the velocity of the microparticle and the applied currents at each of the electromagnets of the magnetic system, an interaction force observer is designed to estimate the contact forces between the microparticle and a soft-tissue simulant with different elasticities.
|
| ||
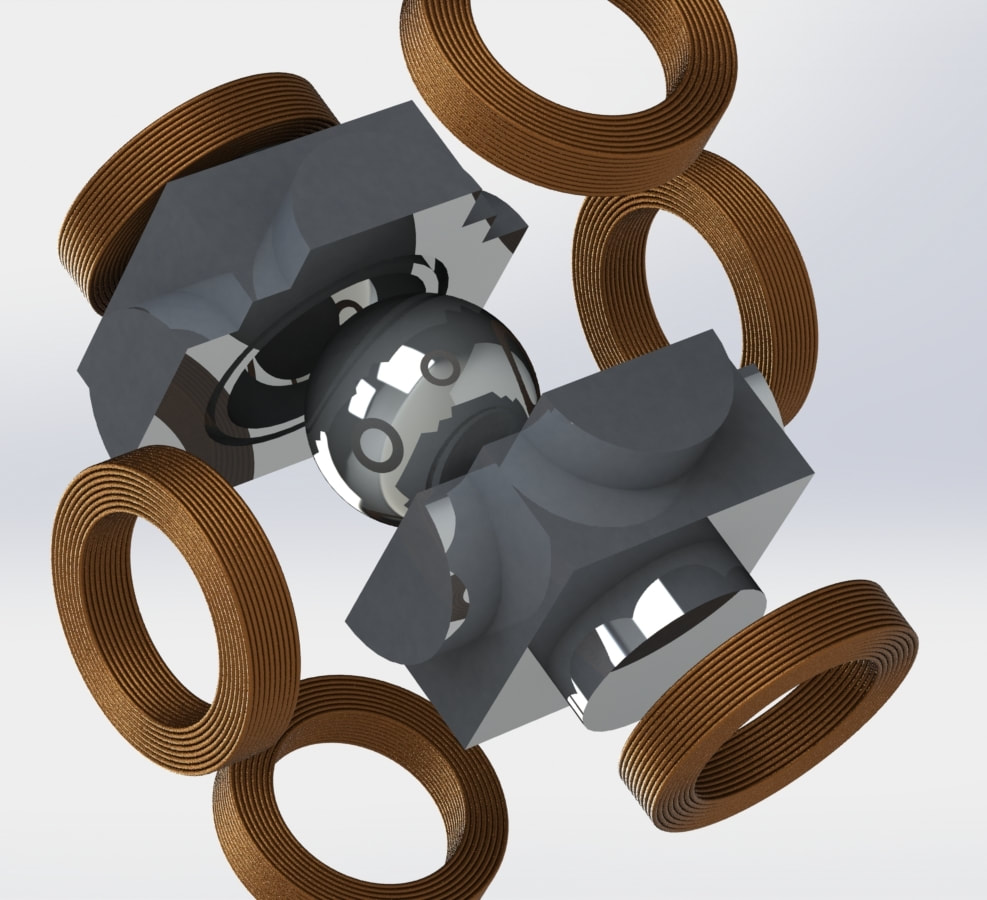
3. Design and Development of An Omnidirectional ElectromagnetDevelopment of an electromagnetic system that generate variable dipole-moment magnitude and orientation without moving parts is of great interest for motion control of helical microrobots at a distance. In this work, we expand on the Omnimagnet of Petruska et al. An Omnimagnet is an omnidirectional electromagnet comprising a spherical ferromagnetic core inside of three orthogonal nested solenoids. It generates a magnetic dipole field with both a variable dipole-moment magnitude and orientation with no moving parts. The focus in this project is on the design and
fabrication of the Omnimagnet and the integration of this electromagnet to the HeliMag system.
|
| ||
4. Control of Helical Microrobots using Helmholtz coils3-axis Helmholtz coils provide uniform magnetic fields that can be used to steer and drive helical microrobots and robotic sperms in low Reynolds numbers. The ultimate goal of this project is to utlilize a 3-axis Helmholtz coils system to control the motion of helical microrobots and robotic sperms in 3D space.
|

| ||