Contacts: Eng. Alaa Adel, Eng. Mina Maged, Dr. Amr El Mougy, Dr. Slim Abdennadher, Dr. Islam Khalil
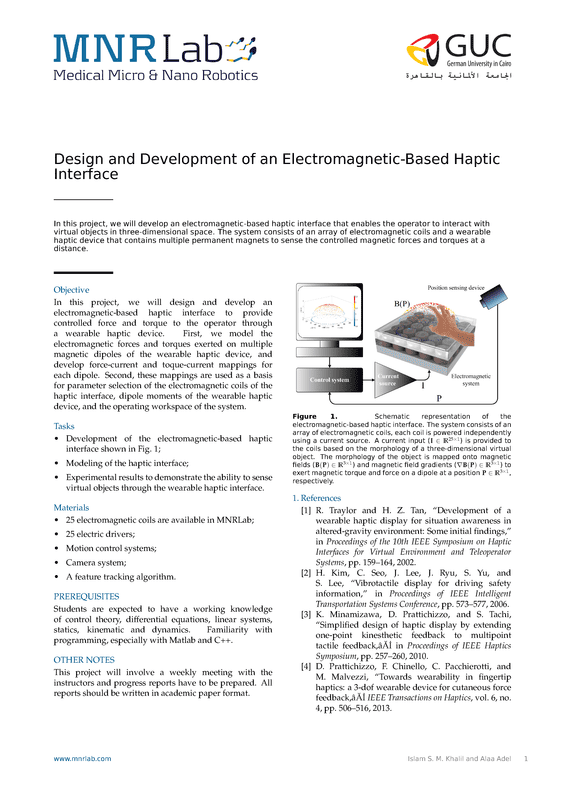
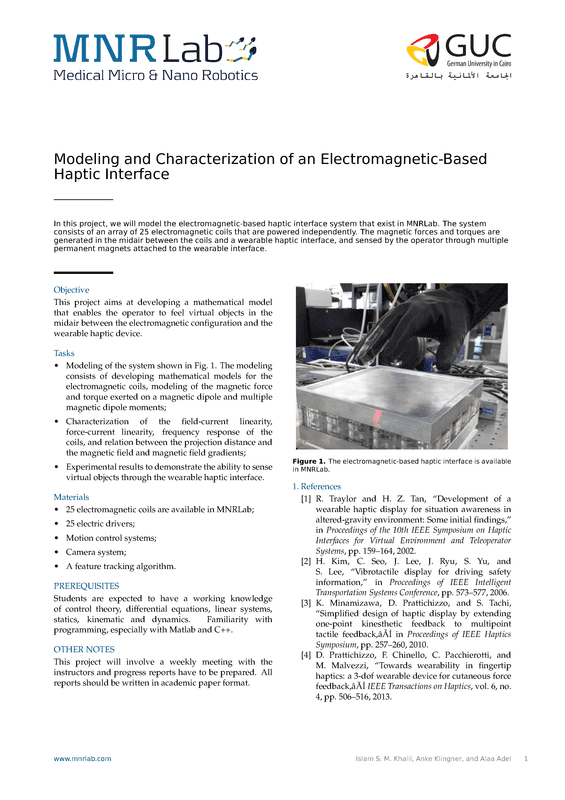
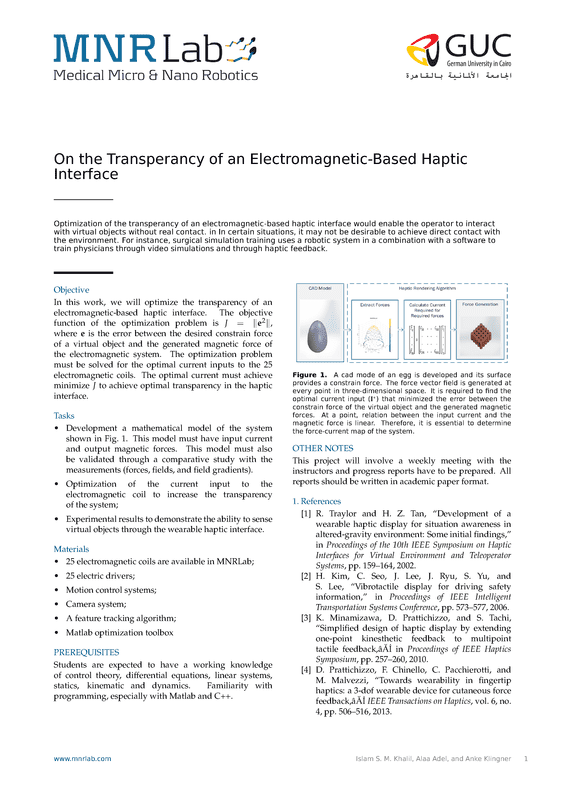
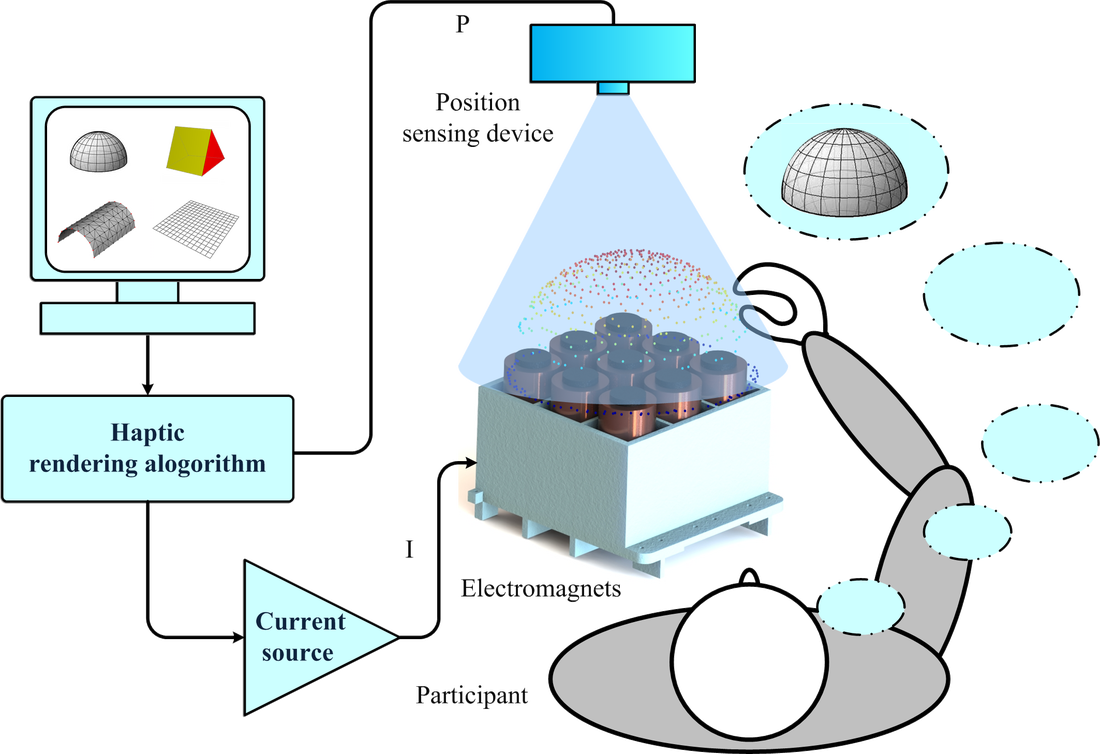
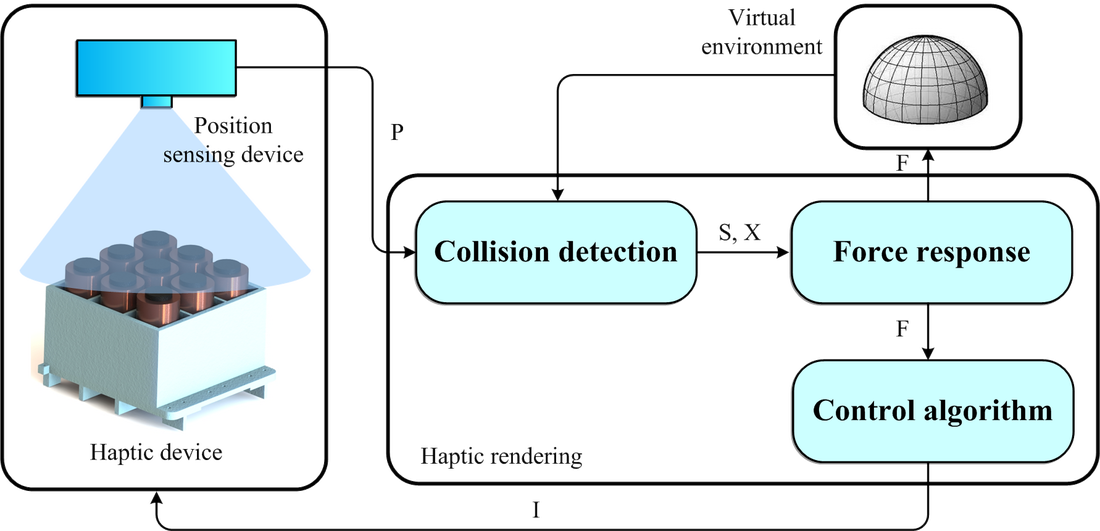
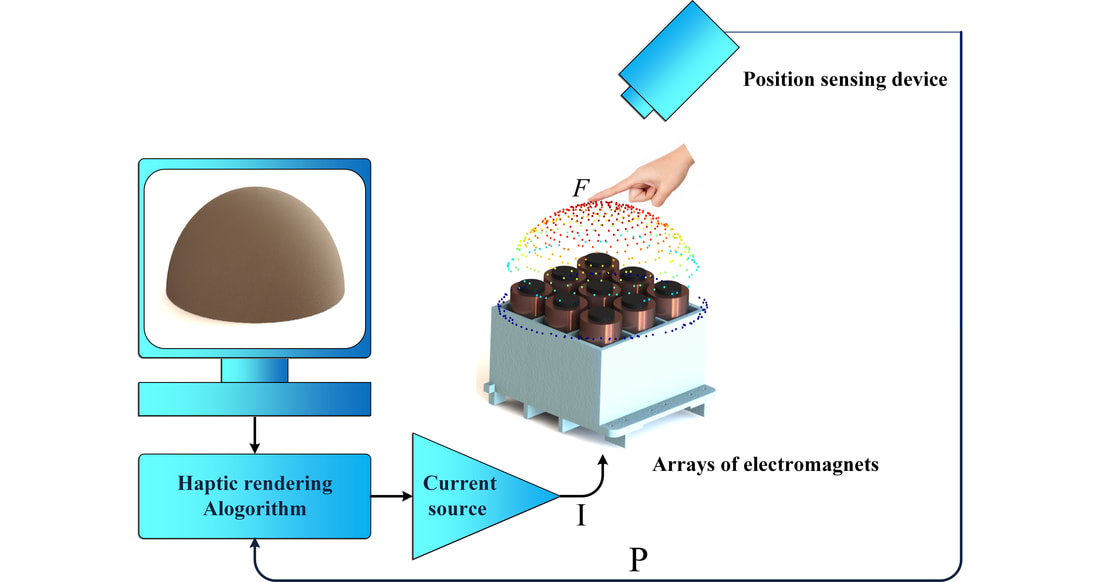
General Information: In certain situations, it may not be desirable to achieve direct contact with the environment. For instance, surgical simulation training uses a robotic system in a combination with a software to train physicians through video simulations and through haptic feedback. We focus on developing electromagnetic-based haptic interface using an array of electromagnetic coils and a wearable haptic device. This system enables the user to feel the interaction forces with virtual obstacles.
1. A Combination between Contour Following and
| |||
| Project details |
2. A Localization Technique based on Magnetic Marker under a Variable Background Magnetic
| |||
| Project details |
3. Force Sensing and Closed Loop Control of an Electromagnetic-based Haptic Interface
4. Haptic Rendering of Volumetric Shapes using Omni-directional Electromagnet
5. Multi-dipoles Interaction with An Electromagnetic-based Haptic Interface
|
| ||||||
6. Passivity and Stability Boundaries for Haptic
| |||
| Project detials |
7. Stiffness Augmentation using an Electromagnetic-based Haptic Interface
|
| ||