Contacts: Osama Mosleh, Dr. Nermeen Serag, Dr. Mohamed Elwi, Dr. Anke Klingner, Dr. Islam Khalil
General Information: Biological microrobots have the potential to meet the continuous demand for miniaturization, which is bounded by the latest development in the field of micromanipulation and microsystems. We focus on types of biological microrobots, namely magnetotactic bacteria (MTBs) and hybrid micro-bio-robots. The nanoparticles enveloped within the cells of the MTBs enable directional control using external magnetic field, whereas their rotating helical body and helical flagella bundeles allow for locomotion in low-Reynolds number regime. Hybrid micro-bio-robots consists of a sperm cell and a magnetic particle. We achieve bio-adhesion between the sperm cells and the magnetic particle to realize a micro-bio-robot. The magnetic particle provides the directional control, whereas the sperm cell provide self-propulsion.
1. Control of Biological Microrobots in a Non-Uniform Flow-FieldThis work addresses the control of Magnetotactic Bacterium (MTB) which can be considered as a biological microrobot. The propulsion force of an MTB is characterized using a microfluidic chip and a syringe pump system. This system allows us to induce controlled time-varying flow rates against and along the motion of an MTB to characterize its propulsion force. Furthermore, we demonstrate the motion control of an MTB against the flowing streams of a growth medium.
|
| ||
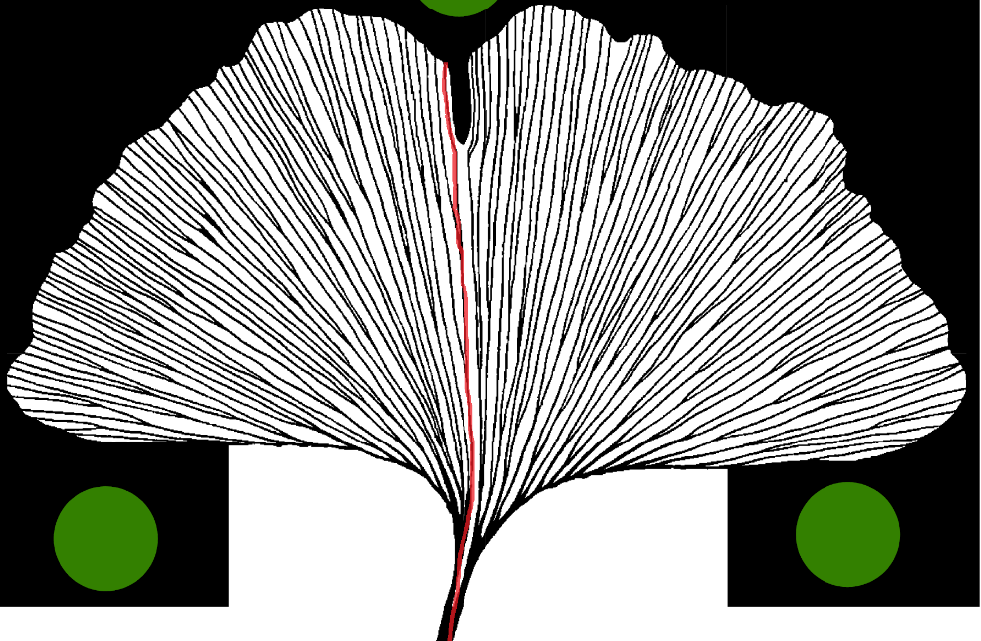
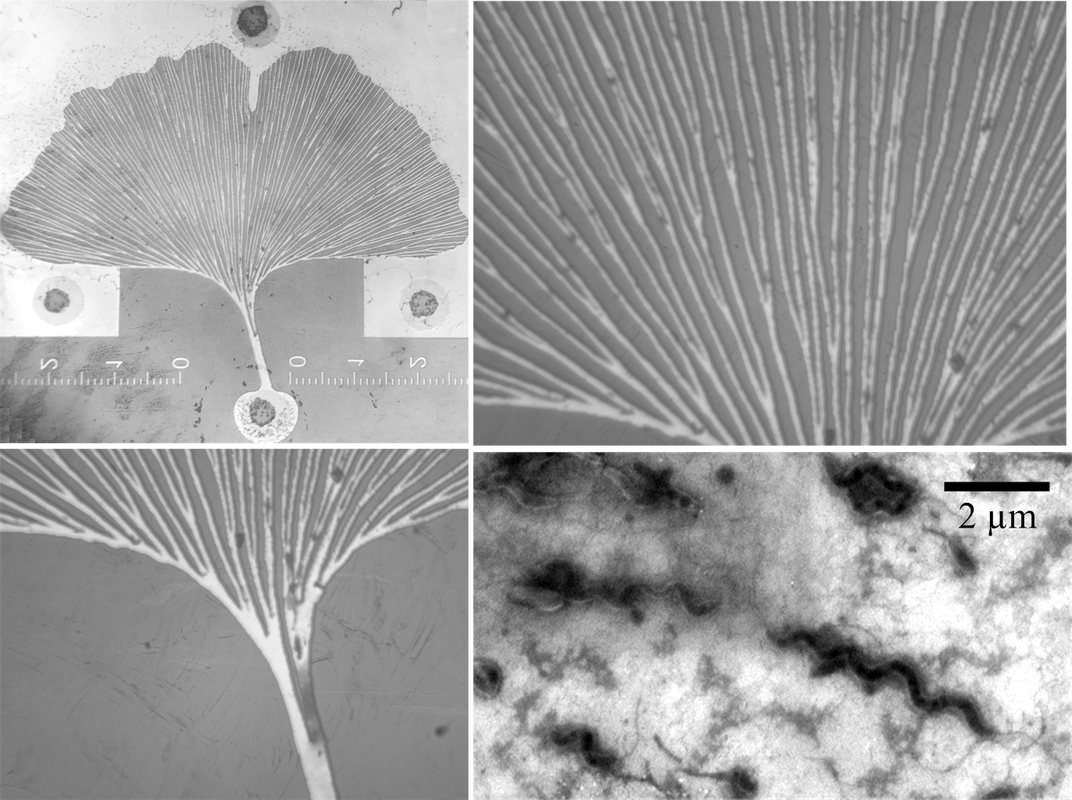
2. Development of a Feature Tracking Algorithm for
| |||
| Project details |
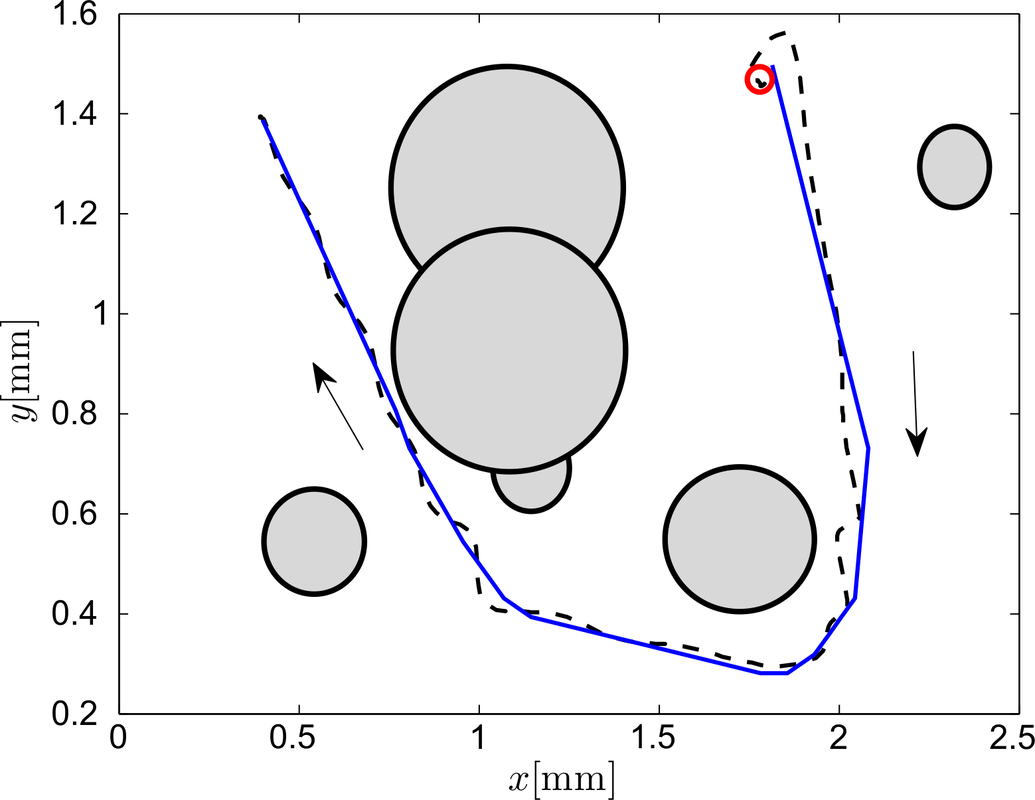
3. Trajectory Planning and Control of Magnetotactic BacteriaIn this project, we will focus on the motion control of magnetotactic bacteria inside fluidic chips with several bifurcations and channels. The ultimate goal of this project
is to demonstrate the ability of the directional control using magnetic fields to steer the bacteria towards a reference position along a pre-specified path.
|
| ||
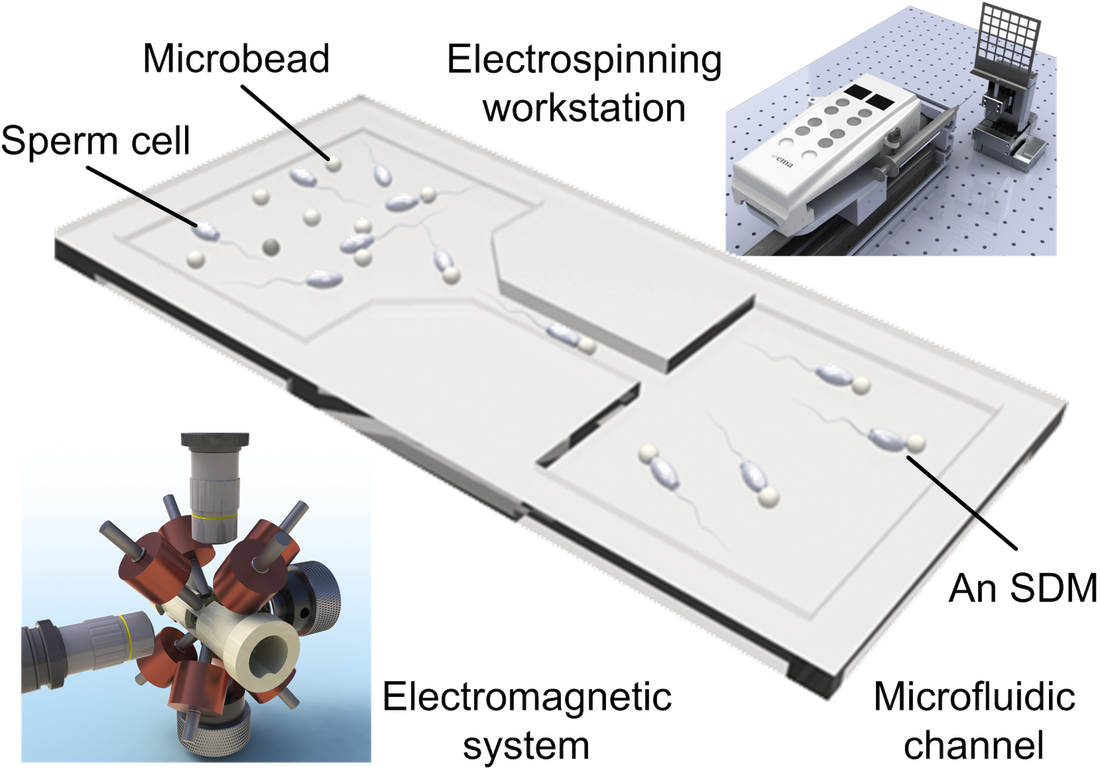
4. Magnetic Control of Sperm CellsUsefulness of targeted therapy using magnetic drug carriers (magnetic microbead, nanobeads, and microrobots) is limited by the relatively small projection distance of the magnetic field gradients of electromagnetic systems. For instance, localization of a few magnetic nanobeads can be only achieved using relatively high magnetic field gradient. This problem can be overcome by the development of self-propelled microrobots to use the magnetic field source only for steering not for driving.
|
| ||
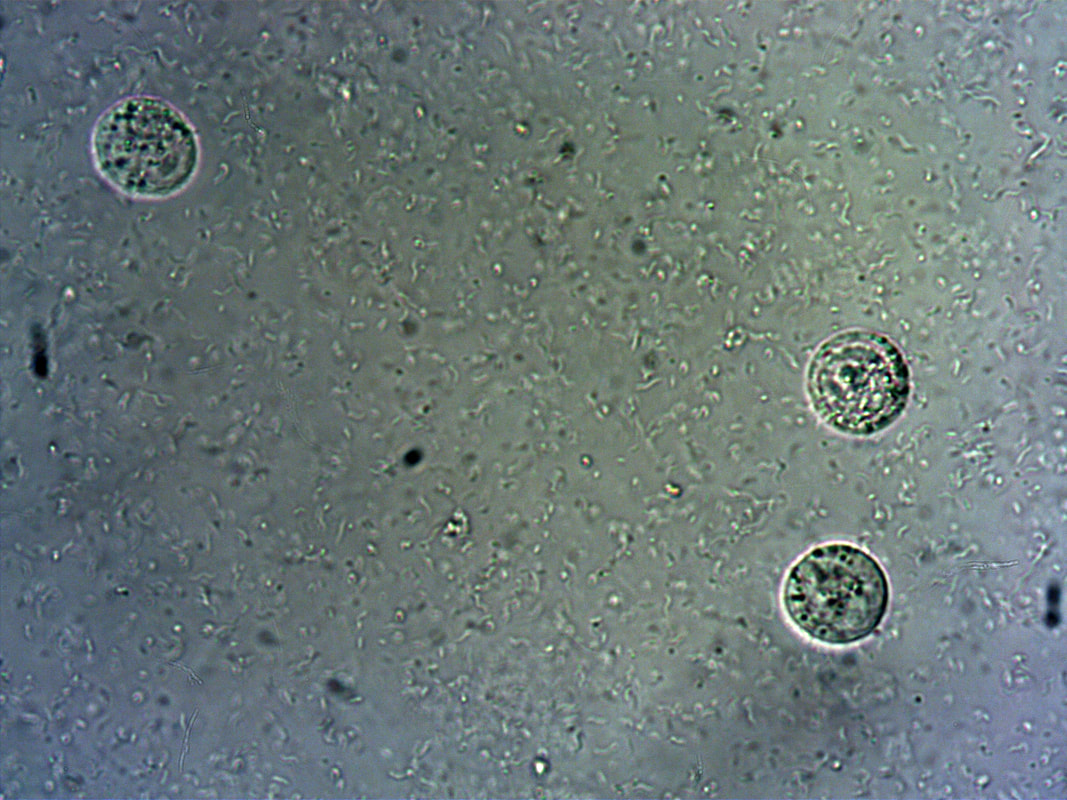
5. Targeting of MCF-7 Breast Cancer Cells using MTBsWe investigate the sensing capabilities of magnetotactic bacteria (Magnetospirillum gryphiswaldense strain MSR-1) to MCF-7 breast cancer cells. Microfluidic chips with a three-way junction are designed and fabricated. These chips contains one inlet and two chambers to insert the bacteria and to contain the cancer cells, respectively. Count of the motile cells is used to understand the behavior of magnetotactic bacteria in the presence and absence of MCF-7 cells.
|
| ||
6. Life of a Magnetotactic BacteriumMagnetotactic bacteria have the potential to access deep regions within the human body. The motion control of this microorganism has been demonstrated using controlled electromagnetic fields. In this work, we will investigate the behaviour of a single bacterium throughout its lifetime. Single cell will be separated from the culture using fluidic microchip and controlled magnetic field.
|
| ||