Contacts: Mr. Mahmoud Abdel Fatah, Eng. Mina Maged, Dr. Islam Khalil
General Information:
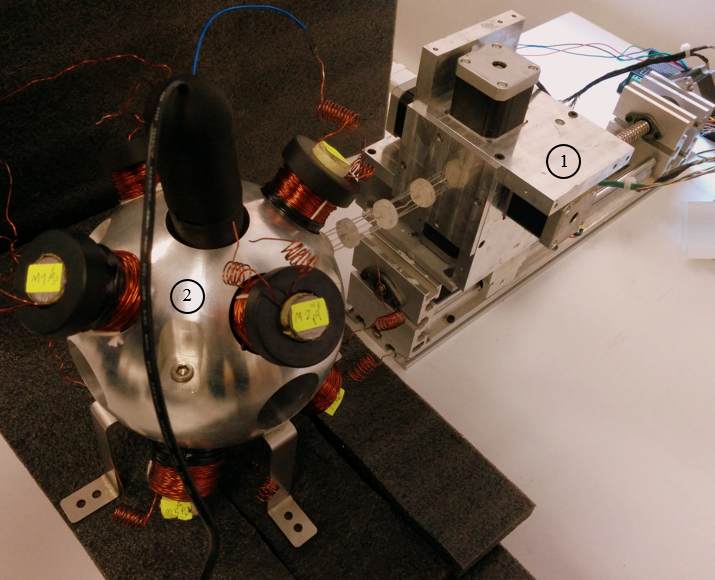
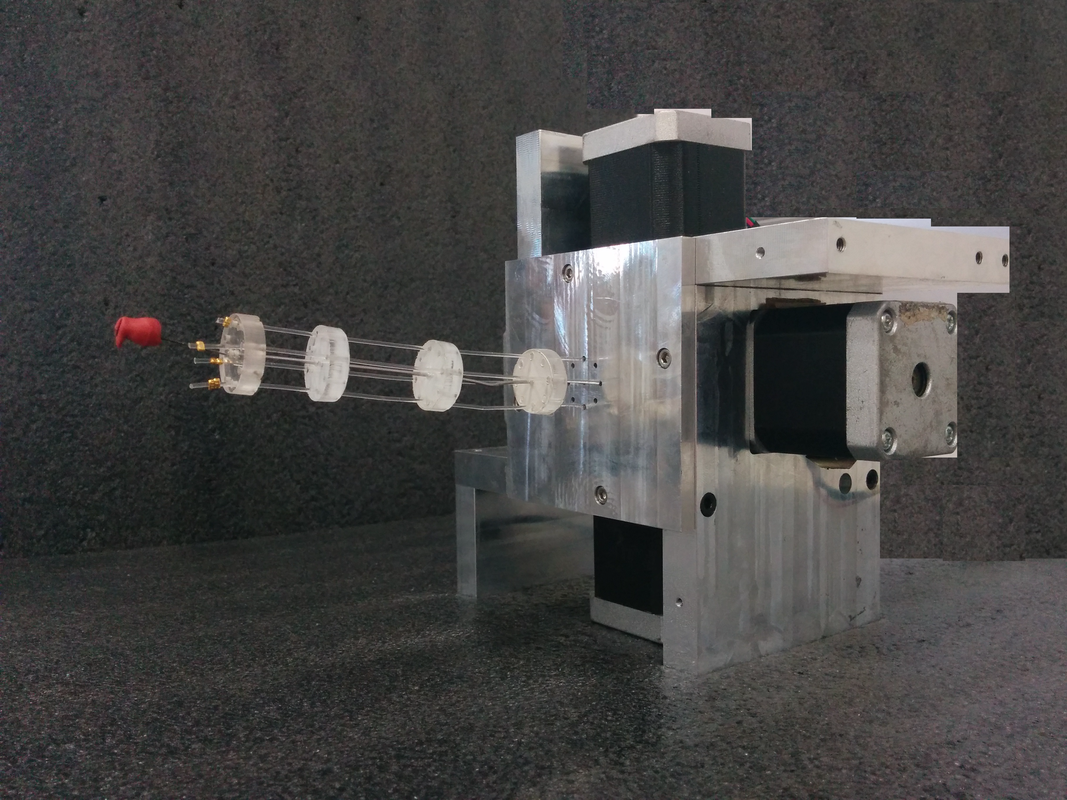
1. Design and Fabrication of a Soft Robotic SystemIn this study, we develop a soft robotic system using a flexible wire and 4 stepper-motors. The stepper-motors are connected to the end-effector of the soft wire via flexible wires that enable actuation in three-dimensional space. First, the robot will be modeled and its kinematics and dynamics will be derived and simulated to understand its behaviour. Second, the motion of the robot will be simulated and animated. Finally, the robot will be fabricated and tested.
|
| ||
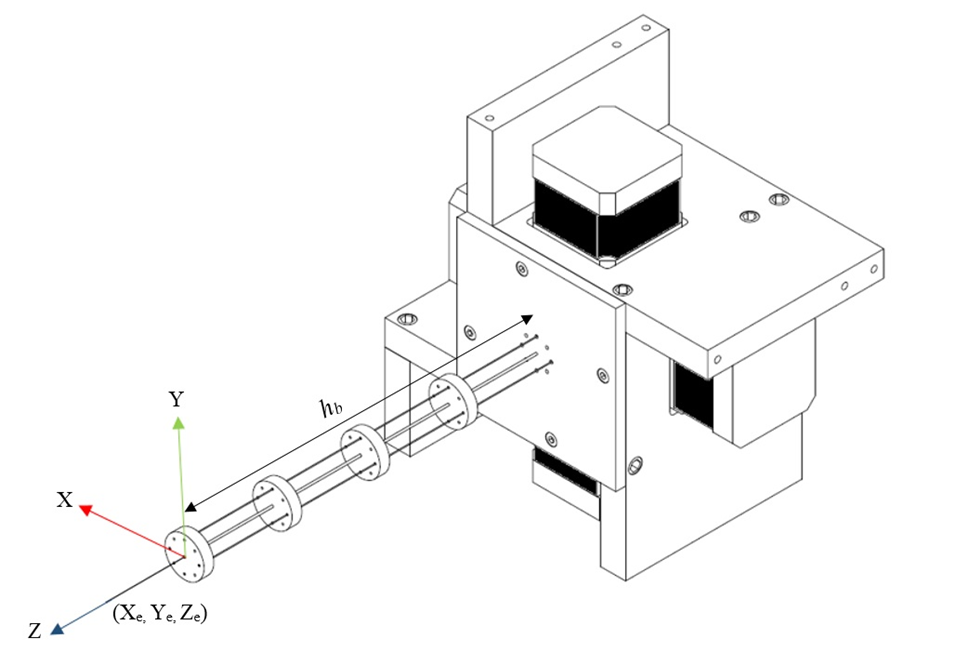
2. Modeling of a Continuum Soft Robotic SystemIn this study, we will model a continuum soft robotic system based on the energy approach. First, we will model its forward and inverse kinematics. The continuum robot will be modeled using continuous (moving) frames. Frenet-Serret moving frames will be used to describe its kinematics in three-dimensional space. Second, we will drive the dynamics of the robot using the Lagrangian approach and simulate the dynamics and design motion control inputs.
|
| ||
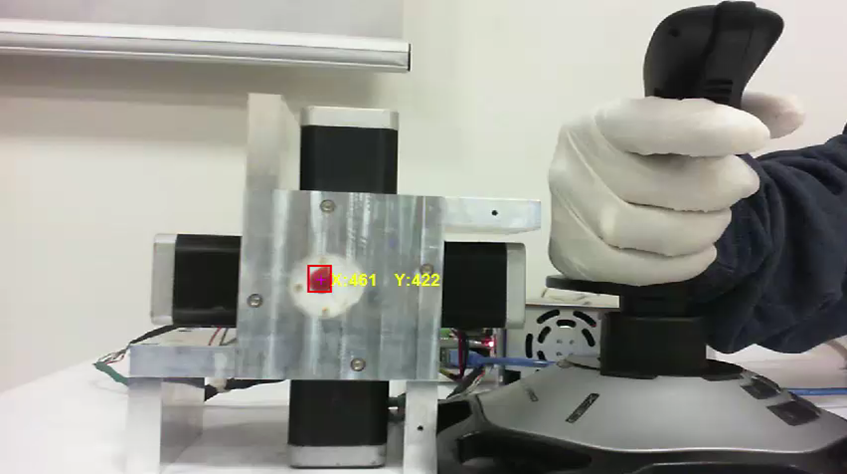
3. Bilateral Tele-manipulation using a Continuum Soft RobotIn this study, we develop a soft robotic system using a flexible wire and 4 stepper-motors. We will also design a closed-loop motion control system to achieve bilateral tele-manipulation using the soft robot. This level of control will enable the operator to manipulate objects that require soft interaction.
|
| ||
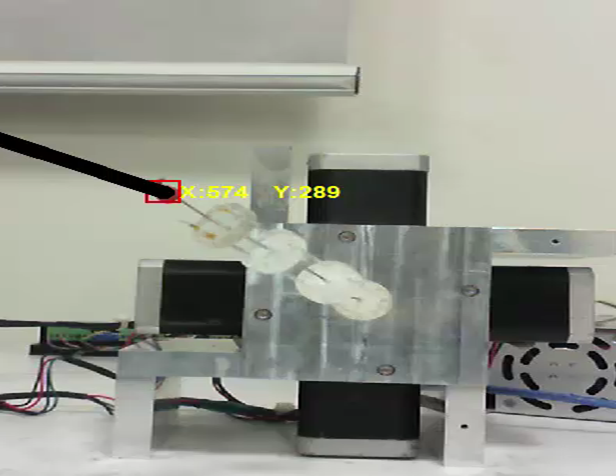
4. Motion Control of a Continuum Soft RobotIn this study, we develop a soft robotic system using a flexible wire and 4 stepper-motors. We will design and implement a closed-loop control system based on position feedback. First, we will derive the dynamics of the robot and devise a closed-loop control input. This control input will be compared to the kinematic control of the robot. Second, we will study the stability of the control input
using passivity approach.
|
| ||
5. Fabrication of a Soft Robot for Targeted Therapy using
| |||
| Project details |