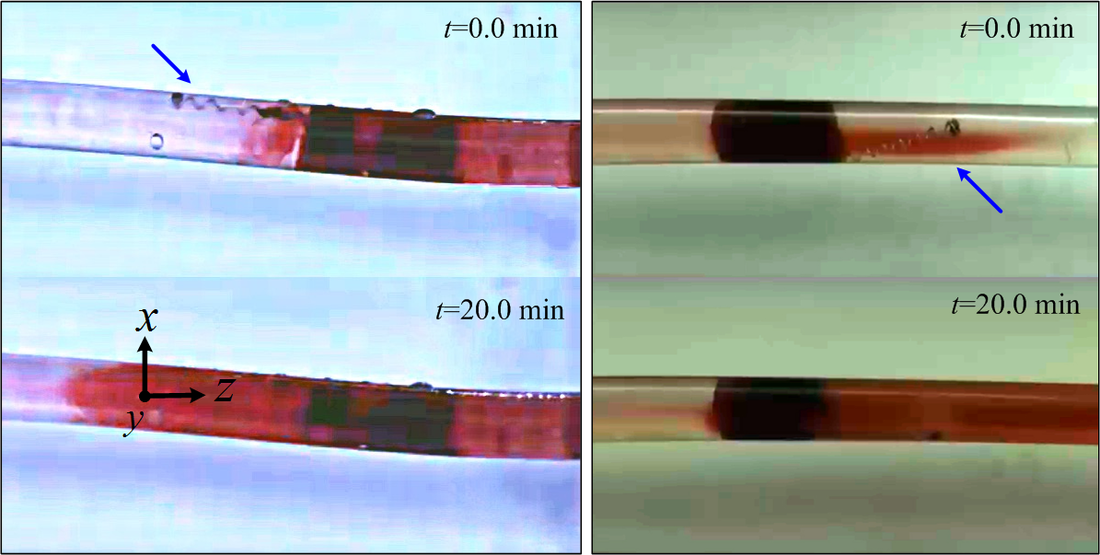
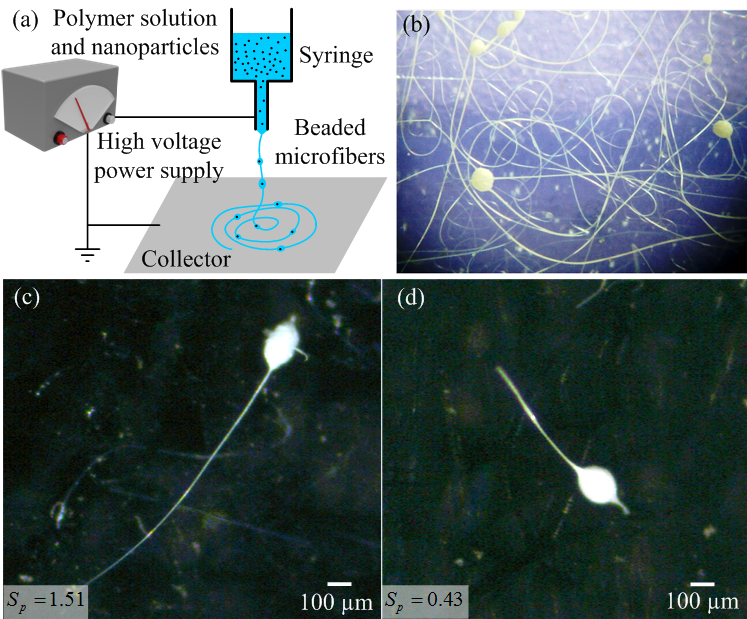
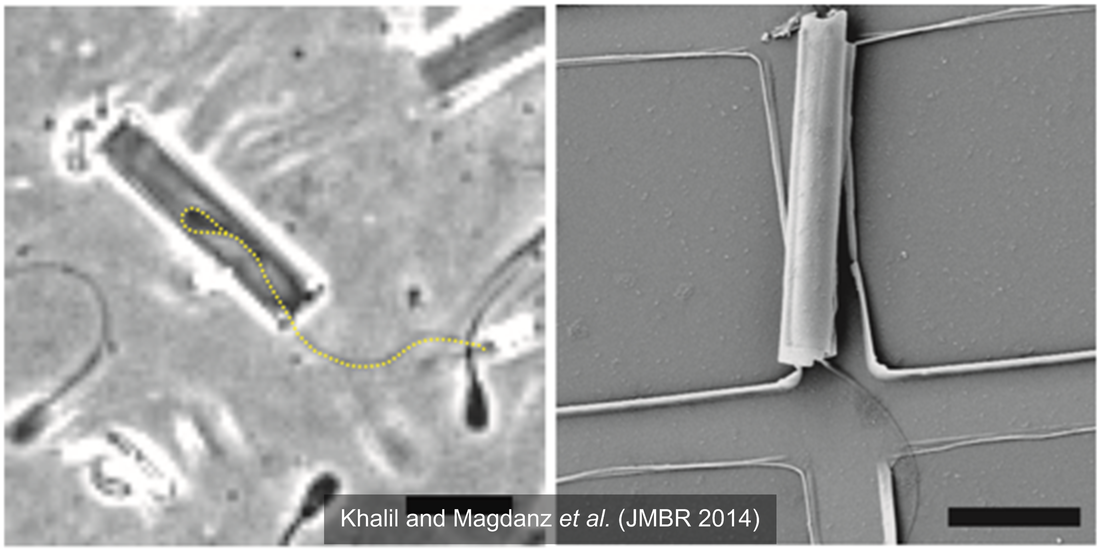
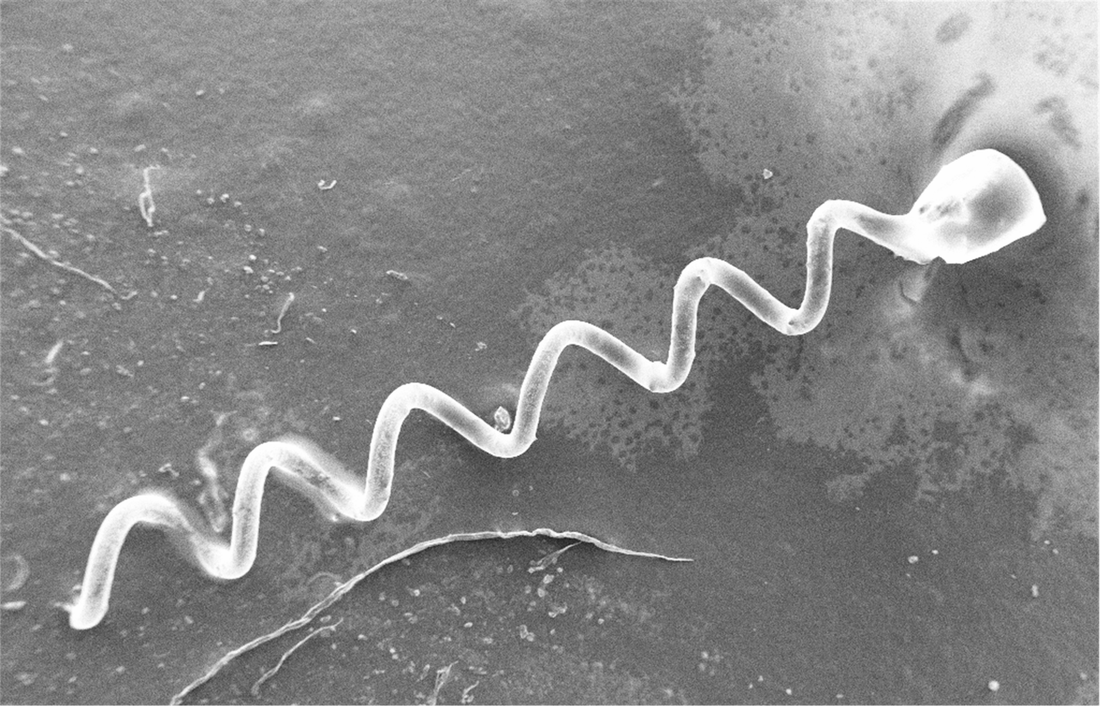
MNRLab is dedicated to create robots in the micro- and nano-scales that are able to autonomously operate at low Reynolds number in diverse environments. We are fascinated by the locomotion of microorganisms such as bacteria and spermatozoa. In seeking nutrient efficiently, these microorganisms undergo different locomotion mechanisms. For example, peritrichously flagellated Escherichia coli swim by wrapping their flagella together in a helical bundle. The continuous rotation of this bundle enables locomotion and swimming back-and-forth. The Escherichia coli tumble whenever it is necessary to change the swimming direction. We are interested in the fabrication and in the mechatronic design and control of biologically-inspired robots such as the MagnetoSperm and the Helical Microrobot. The MagnetoSperm mimics the morphology of a sperm cell (left image), whereas the Helical Microrobot is designed based on the Escherichia coli (Right).
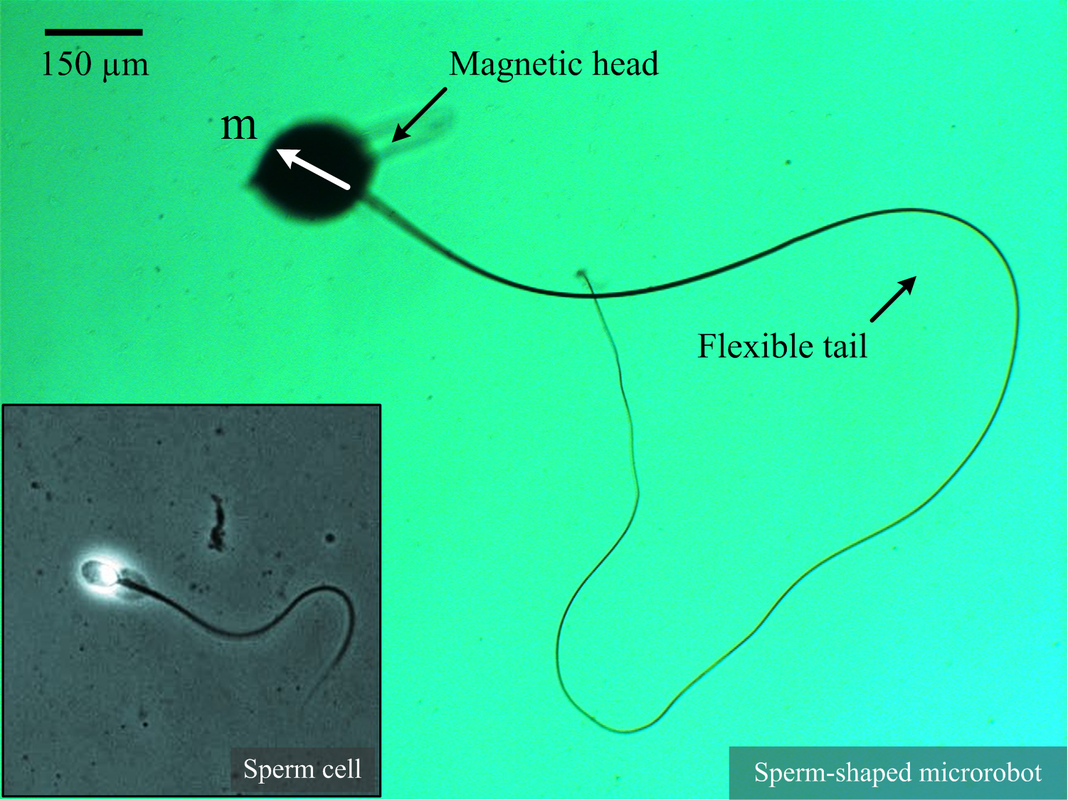
We are furthermore keen to give them the intelligence to navigate controllably using external actuation via the action of a magnetic field. Recently, we managed to target cell mockups using MagnetoSperm
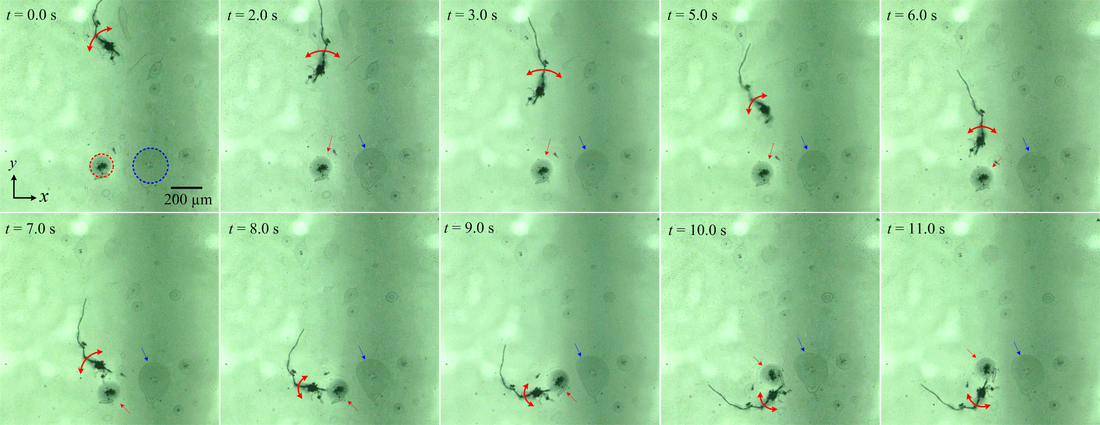
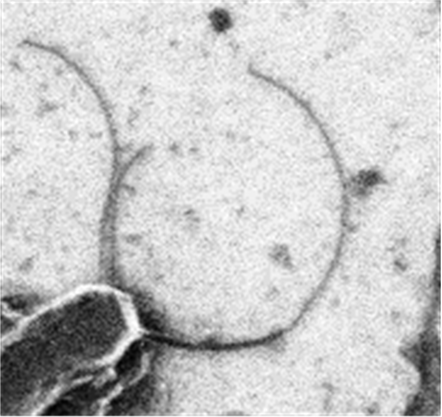
The Helical Microrobots have excellent ability to penetrate soft-tissue and navigate controllably using rotating magnetic fields. We have also achieved mechanical grinding of blood clots using these Microrobots in vitro