Contacts: Dr. Anke Klingner, Dr. Amna Ramzy, Dr. Mohamed Elwi, Dr. Islam Khalil
General Information: Biologically inspired microrobots have diverse biomedical applications. Robotic sperms have similar morphology to that of sperm cells. These artificial swimmers have magnetic head and flexible artificial flagellum. They undrego flagellated swim under the influence of oscillating magentic field. We fabricate the robotic sperms by electrospinning, using polysterine and iron oxide nanoparticles.
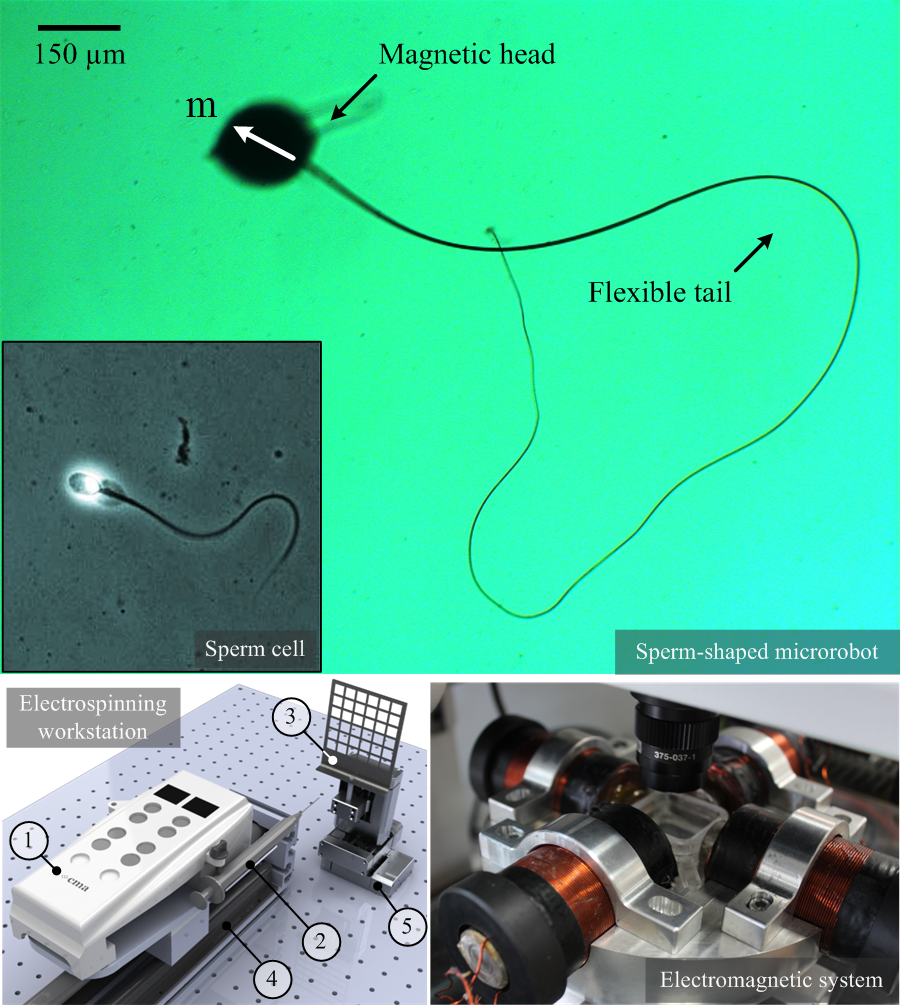
1. Modelling and Simulation of Biologically Inspired MicrorobotsWe experimentally demonstrate that using oscillating weak magnetic fields, a sperm-shaped microrobot (which we refer to as MagnetoSperm) can swim using flagellar propulsion and slide on a surface under water. The sperm morphology allows the MagnetoSperm to mimic the locomotion mechanism of a living sperm cell. The MagnetoSperm is designed and developed with a magnetic head and a flexible tail to provide a magnetic dipole moment and propulsion, respectively. The head oscillates under the influence of controlled oscillating weak magnetic fields (5 mT). This oscillation generates a thrust force in the flexible tail, and hence allows the MagnetoSperm to overcome the drag and friction forces during swimming and sliding on a surface under water, respectively.
|
| ||
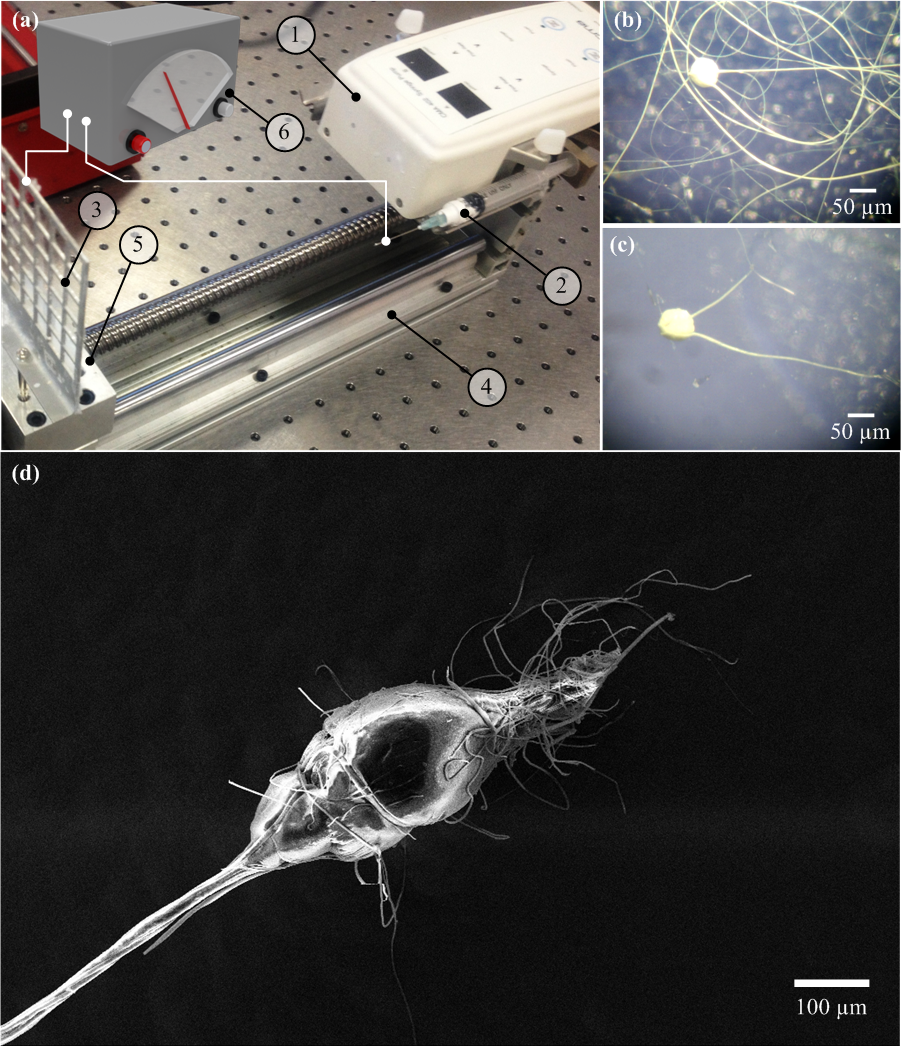
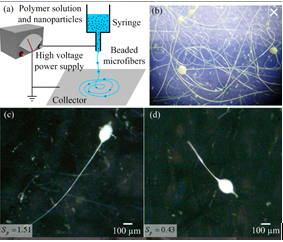
2. Fabrication and Characterization of MagnetoSpermsTargeted therapy using MagnetoSperms have the potential to mitigate the negative side-effects associated with conventional treatment. We fabricate MagnetoSperms by an electrospinning technique using polystyrene, dimethylformamide and iron oxide nanoparticles. An empirical model of the size of the magnetic microparticles and the parameters (electric potential, concentration of the solutions and nanoparticles, and dynamic viscosity of the fluid) of the electrospraying technique is developed. The magnetic dipole moment of the microparticles is characterized using a an electromagnetic system and a force sensor at the microscale. In addition, we experimentally demonstrate closed-loop motion control of the microparticles under the influence of the controlled magnetic field gradient in three-dimensional space.
|
| ||
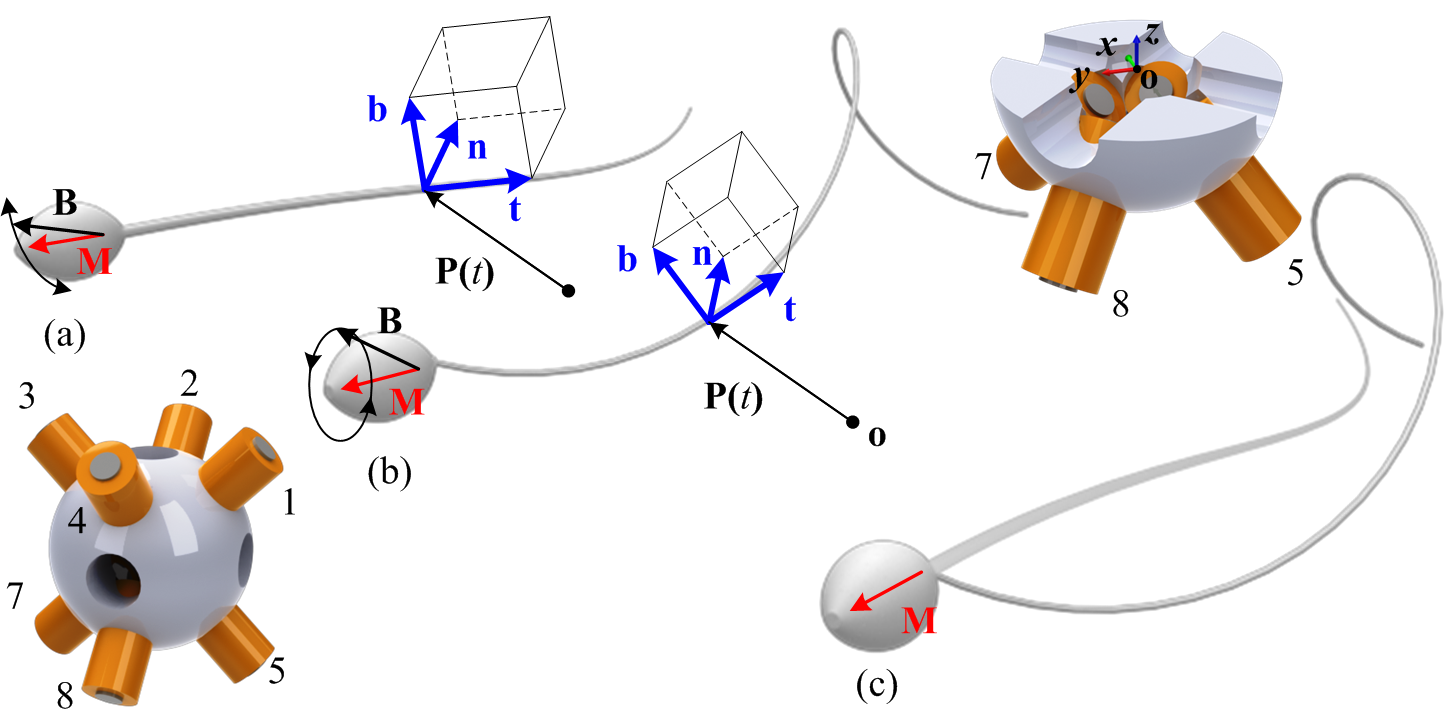
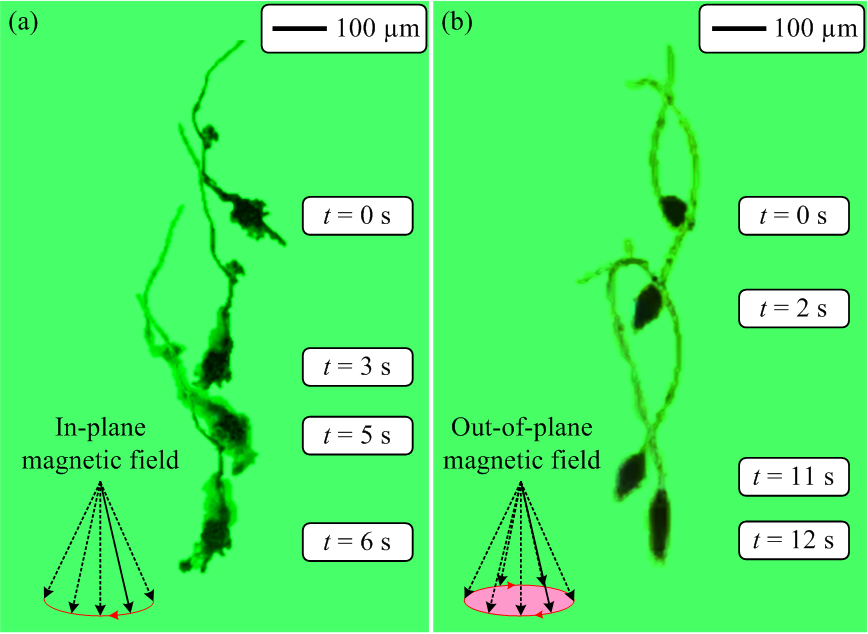
3. On The Transition Between Planar and Helical Wave PropulsionWe will fabricate robotic sperms using electrospinning. The ability to enforce a transition between planar and helical locomotion using dynamic magnetic fields is the objective of this work.
|
| ||
4. Realization of Helical Flagellated Swim using Robotic SpermsSperm cells swim by inducing bending moment through their flagellum or by inducing a helical travelling wave. In this project, we will focus on the realization of helical travelling wave through the ultra-thin fiber of the robotic sperms. These artificial swimmers are fabricated using electrospinning and consist of a magnetic head and an artificial flagellum that resembles the morphology of a sperm cell.
|
| ||
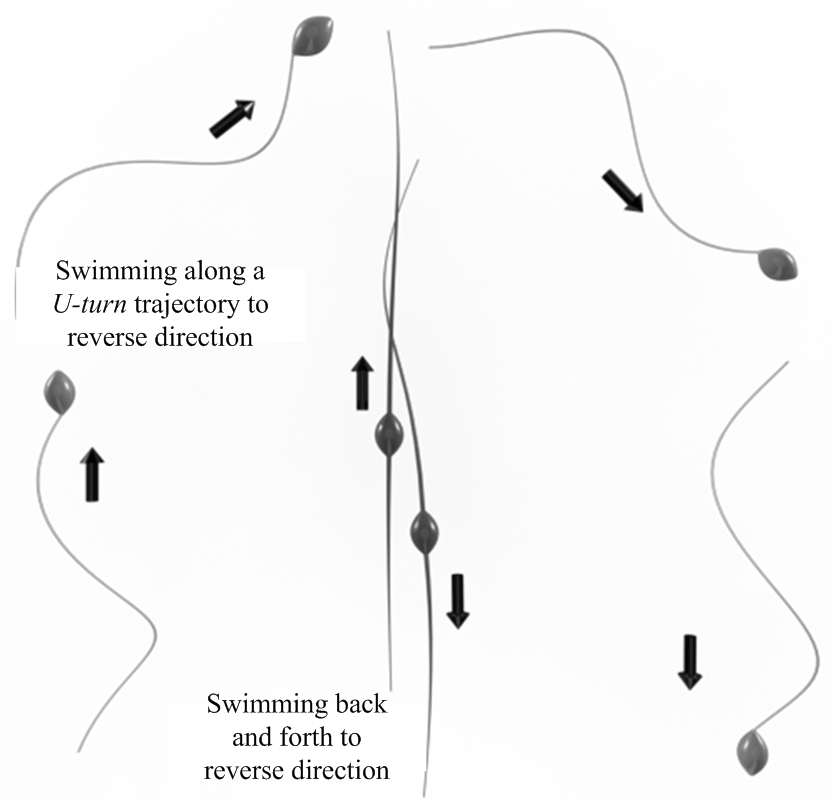
5. How Should Robotic Sperms Swim Back-and-Forth?Helical microrobot can swim back-and-forth by reversing the dirction of their rotation. However, robotic sperms can only swim along one direction based on planar travelling waves. It has to undergo a U-turn in order to reverse its direction of motion. In this work, we will investigate a method that will enable the robotic sperm to swim back-and-forth without making a U-turn trajectory. We will investigate a method that enables robotic sperm to swim back-and-forth using a flagellated swim.
|
| ||
6. Fabrication and Characterization of Robotic Sperms using
| |||
| Project details |
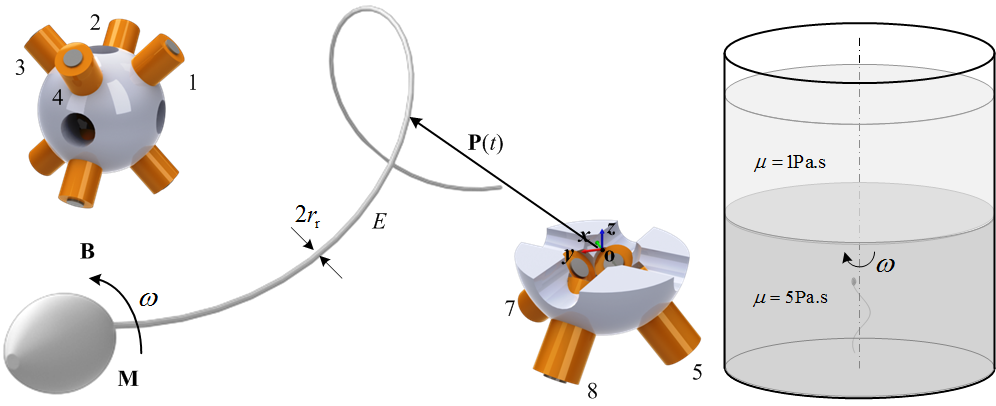
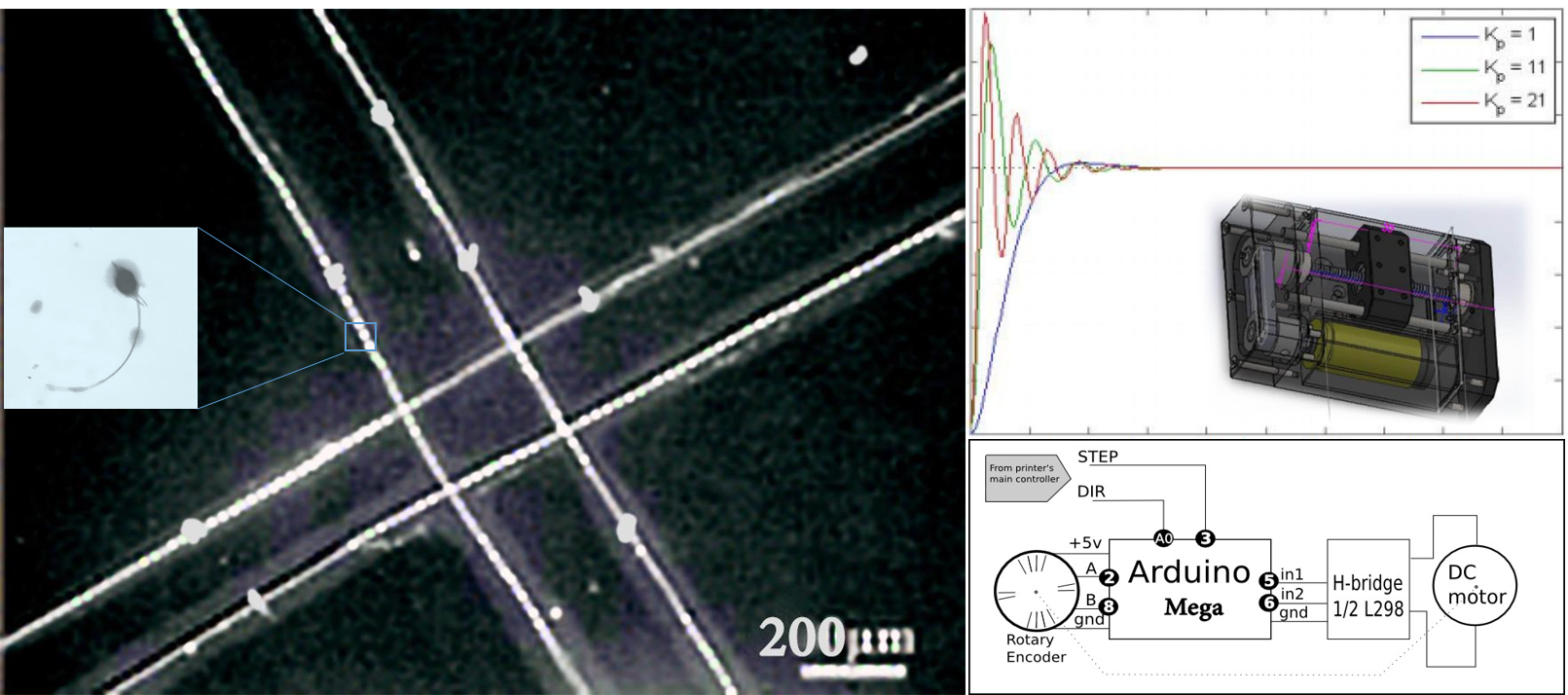
7. Micro Scale 3D printing of Micro-Robots
|
|
| Project details |
| Project details |
8. Mechanical Separation Process of the Micro-Robots MagnetoSperms (MATS)
Targeted therapy using MagnetoSperms have the potential to mitigate the negative side-effects associated with conventional treatment.
| mechanical_separation_of_magnetosperms.pdf |