Contacts: Eng. Dalia Mahdy, Dr. Anke Klingner, Dr. Nabila Hamdy, Dr. Mohamed Elwi, Dr. Islam Khalil
General Information: Biologically inspired microrobots have diverse biomedical applications. Helical microrobots consist of helical spring attached to a cylindrical NdFeB magnet with a magnetization vector oriented perpendicular to the spring axis. The microrobot breaks time-reversal symmetry and swims in a fluid characterized by low-Reynolds number upon the application of rotating magnetic fields. We use two electromagnetic configurations to control the motion of the helical microrobots, namely the Helmholtz electromagnetic configuration and the HeliMag system.
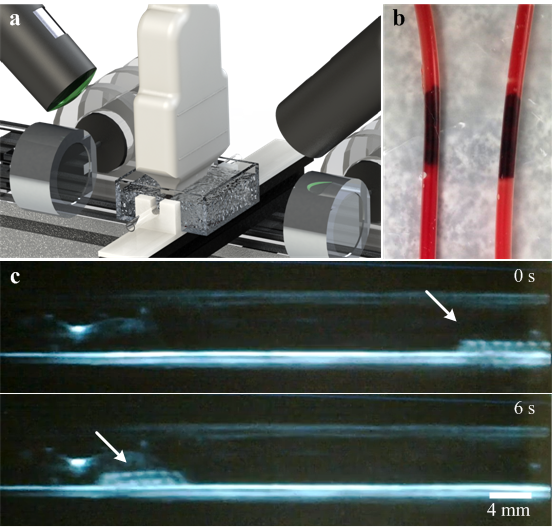
1. Clearing of Blood Clots In Vivo under Ultrasound GuidanceHelical microrobots have the potential to swim inside Newtonian fluid (e.g., silicon oil and blood) and viscoelastic environment (e.g., tissue). Therefore, these microrobots have diverse biomedical applications, such as targeted drug delivery, cell sorting, cell characterization, and clearing of clogged arteries. In this work, we will focus on the motion control of helical robot using two rotatind dipole field under ultrasound guidance. The ultimate goal of this project is to clear blood clots in vivo.
|
| ||
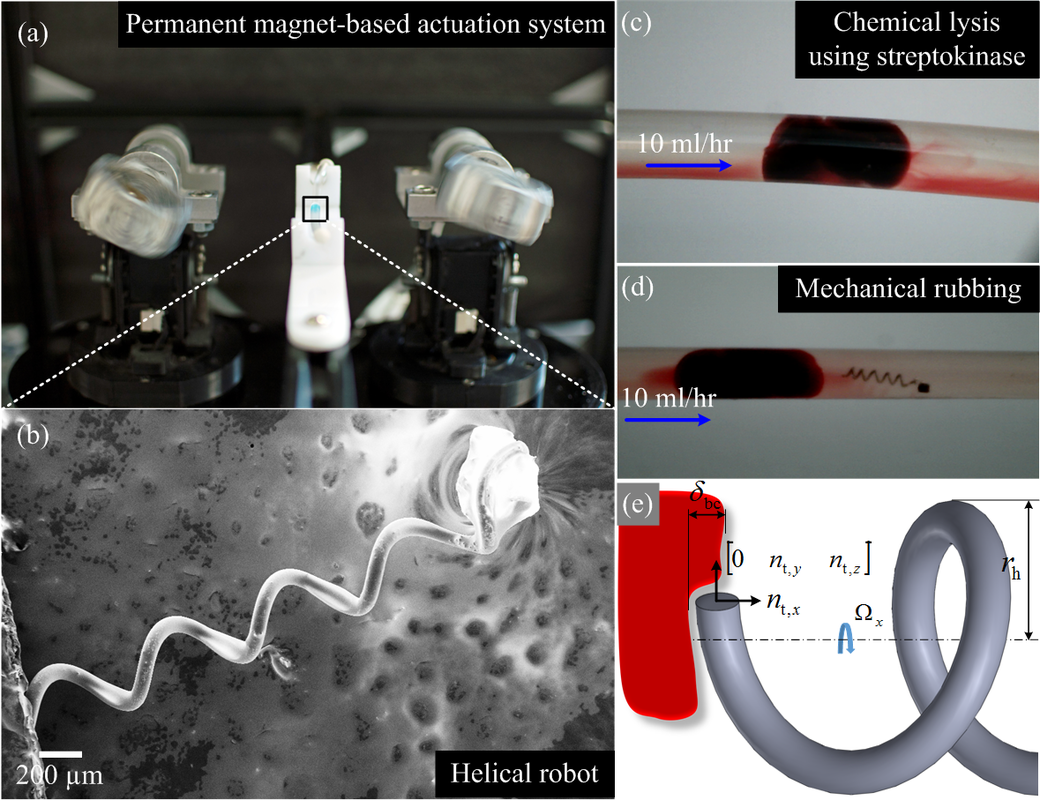
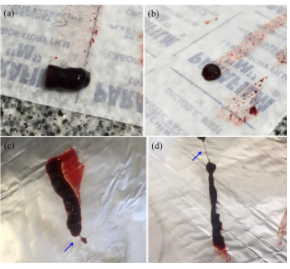
2. Comparative Study between Clearing Blood Clots using Helical Microrobots and Chemical Lysis in VitroWe will achieve mechanical penetration of blood clots using helical microrobots with average diameter of 0.3 mm inside catheter segments without chemical lysis. The helical microrobot is steered and propelled under the influence of rotating magnetic fields (20 mT). The mechanical grinding of blood clots will be compared to chemical lysis to optimize the integration of the mentioned two technqieues in clearing blood clots.
|
| ||
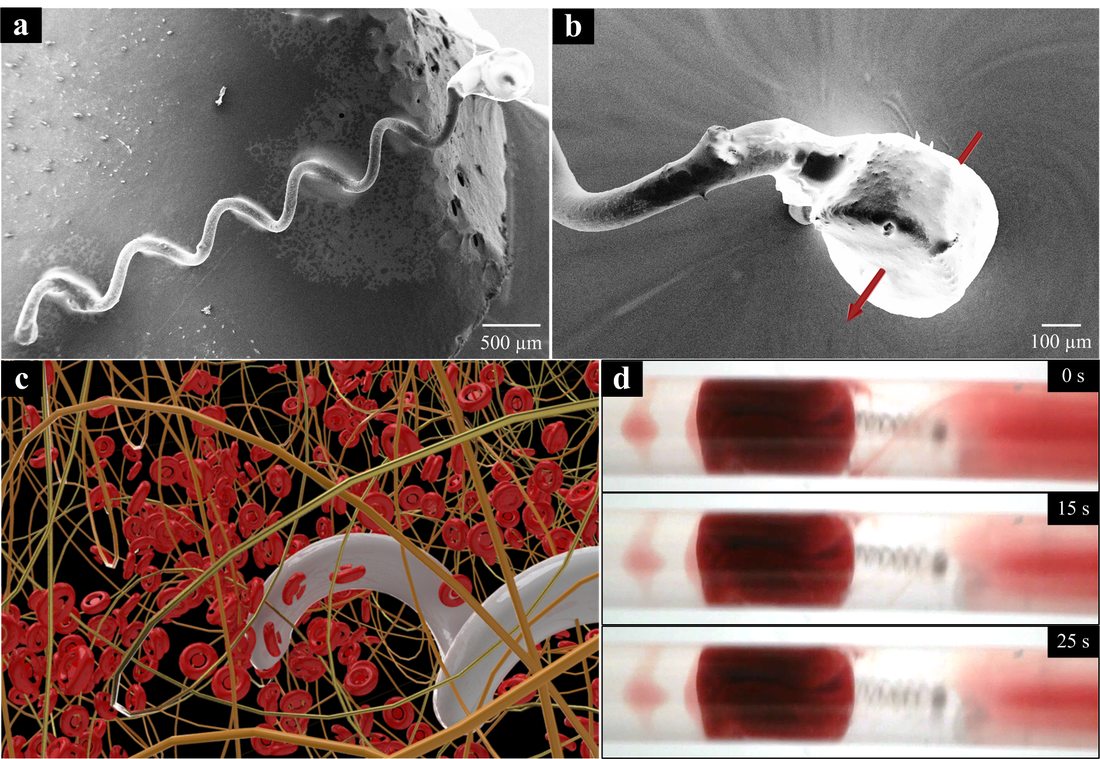
3. Optimization of the Mechanical Grinding of Blood Clots in VitroMechanical grinding of blood clots is influenced by several parameters, such as the strength of the magnetic field, magnetic field gradient, and rotation frequency of the rotating dipole fields. Here we will focus on optimizing the grinding parameters to minimize the clearing time of blood clots.
|
| ||
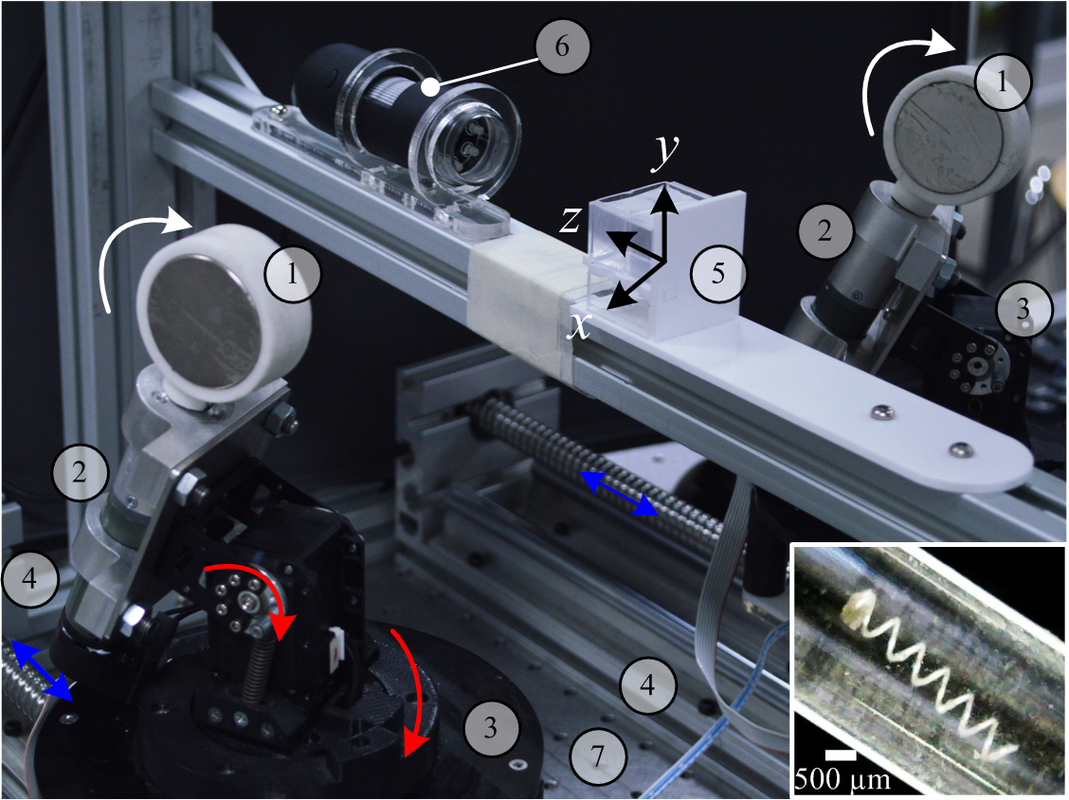
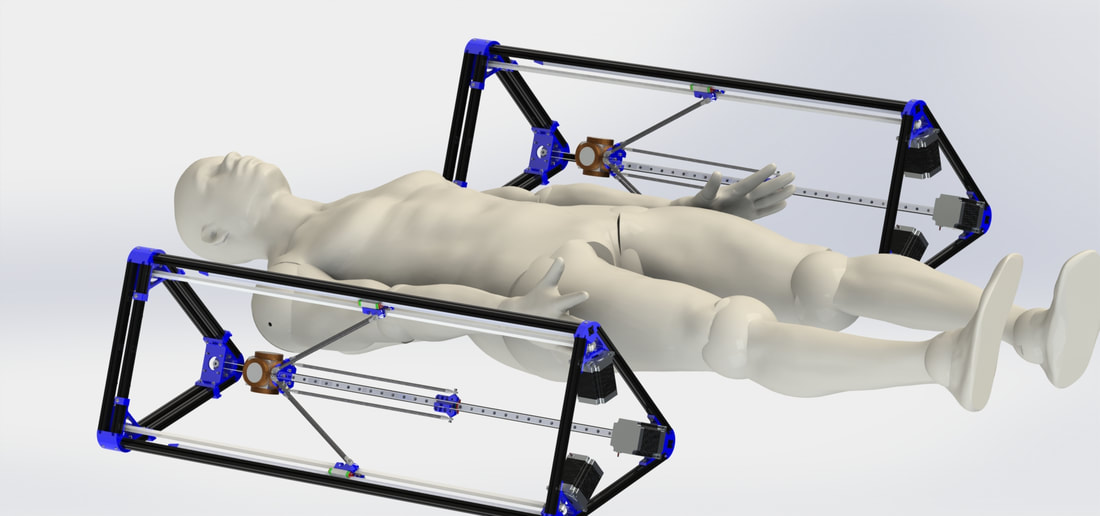
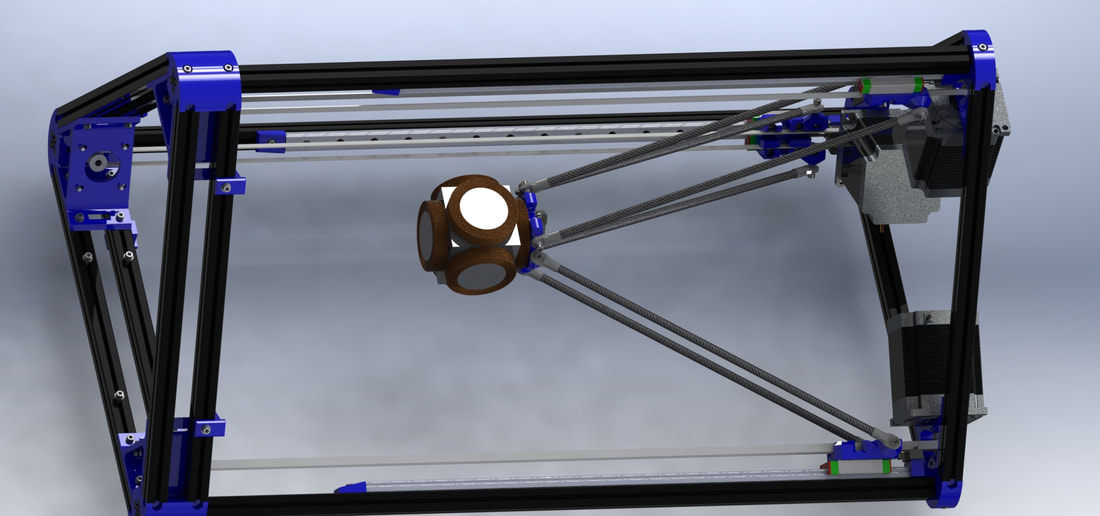
4. HeliMag: A Permanent Magnet-Based Robotic SystemHeliMag is a magnetic-based robotic system that consists of two linear motion stages. Their motion is synchronized and controlled. Each motion stage carries a robotic base with 3 degrees-of-freedom. The end-effector of each robotic base holds a DC motor that rotates a permanent magnet with outer diameter and thickness of 38 mm and 20 mm, respectively. The objective of this project is to develop an electronic system and control the motion of the two robotic arms within the system. The electronic board should connect 8 degrees-of-freedom.
|
| ||
5. HeliMag 3: A Magnetic-Based Robotic System for Targeted
| |||
| Project details |
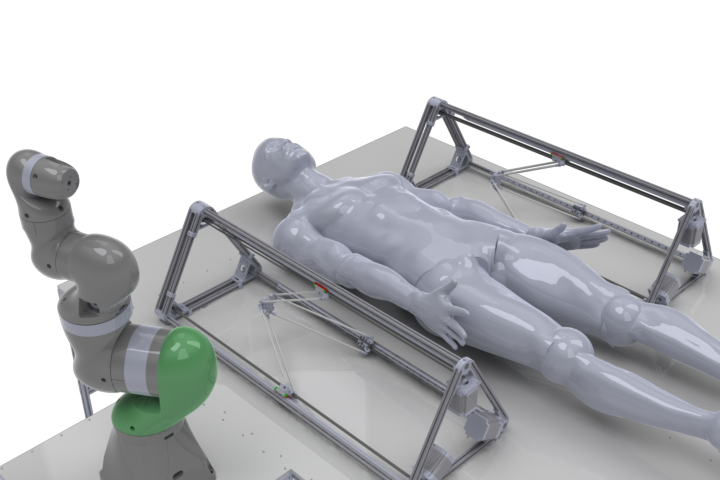
6. An Electromagnetic-Based Robotic System for Minimally Invasive InterventiosMicrorobot can navigate throughout the cardiovascular system of humans and reach deep seated regions inaccessible by conventional and minimally invasive surgeries. This level of control necessitates the integration of an electromagnetic system with an open configuration such as the HeliMag system and a robotic arm to provide visual feedback using a microscopic vision system.
|
| ||
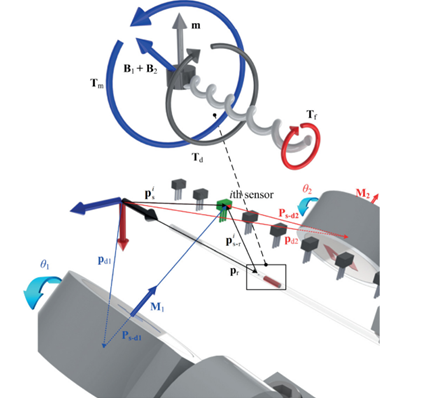
7. Clearing of Blood Clots in vivo under Hall Effect Sensor Guidance.
Helical microrobots have the potential to swim inside Newtonian fluid (e.g., silicon oil and blood) and viscoelastic environment (e.g., tissue). Therefore, these microrobots have diverse biomedical applications, such as targeted drug delivery, cell sorting, cell characterization, and clearing of clogged arteries. In this work, we will focus on the motion control of helical robot under Hall effect sensor guidance. Since the ultimate goal of this project is to clear blood clots in vivo and that camera feedback would not be possible then, Hall effect sensor feedback would prove more beneficial.
| clearingbloodclotsinvivounderhall.pdf |
8. Tissue penetration via helical microrobots in Vitro.
Penetration of tissues using helical robots is influenced by several parameters. Some parameters are related to the setup used to control the helical robots such as the strength of the magnetic field, magnetic field gradient, and rotation frequency of the rotating dipole fields. Another parameter that affects the penetration process is related to the type of tissue since certain tissue are harder than others. Here we will focus on penetration of several types of tissues including heart, liver and brain tissue and assessing the ability of helical microrobots to penetrate the different types of tissues.
| tissuepenetration__1_.pdf |